Parameterization Tutorial
Invited lecture given at Universidad Nacional de Colombia Numerical Analysis class.
I was invited by my undergrad supervisor(Juan Galvis) to give a lecture for the undergrad class of numerical analysis for CS and Math majors. The lecture was supposed to present a problem to the undergrads in such a way that they apply the tools they’ve learnt about floating point, numerical linear algebra and solutions of non-linear systems.
From these considerations I decided to give a small introdution to GANs(Generative Adversarial Networks) and present the problem of parameterization in computer graphics. The former has an interesting story about floating point and the latter has a clear visual interpretation and numerical problems. In the problem of parameterization, one easily encounters numerical linear algebra and to understand the algorithms, a surface level knowledge of differential geometry, is enough. I made some slides and prepared a Jupyter Notebook, I’m posting both things here.
Slides:
Table of Contents
- Requirements
- Mesh Representation
- 1.1 Sample Meshes
- Fixed Boundary Parameterization
- Free Boundary Parameterization
- Atlas Parameterization
- Appendix: Harmonic Parameterization Implementation
- References
0. Requirements
Only two libraries are needed for this notebook:
- Libigl
- Meshplot
Libigl can be downloaded from Conda forge:
conda install -c conda-forge igl
All of libigl functionality depends only on numpy and scipy. For the visualization in this tutorial we use meshplot which can be easily installed from Conda:
conda install -c conda-forge meshplot
The tutorials and documentation for both libraries can be found here and here.
import igl
import scipy as sp
import numpy as np
from meshplot import plot, subplot, interact, utils
import os
import matplotlib.pyplot as plt
from IPython.display import Image, display
import PIL as PIL
from PIL import ImageOps
root_folder = os.getcwd()
1. Mesh Representation
Libigl uses numpy to encode vectors and matrices and scipy for sparse matrices.
A triangular mesh is encoded as a pair of matrices:
v: np.array
f: np.array
v is a #N by 3 matrix which stores the coordinates of the vertices. Each row stores the coordinate of a vertex, with its x, y and z coordinates in the first, second and third column, respectively. The matrix f stores the triangle connectivity: each line of f denotes a triangle whose 3 vertices are represented as indices pointing to rows of f.
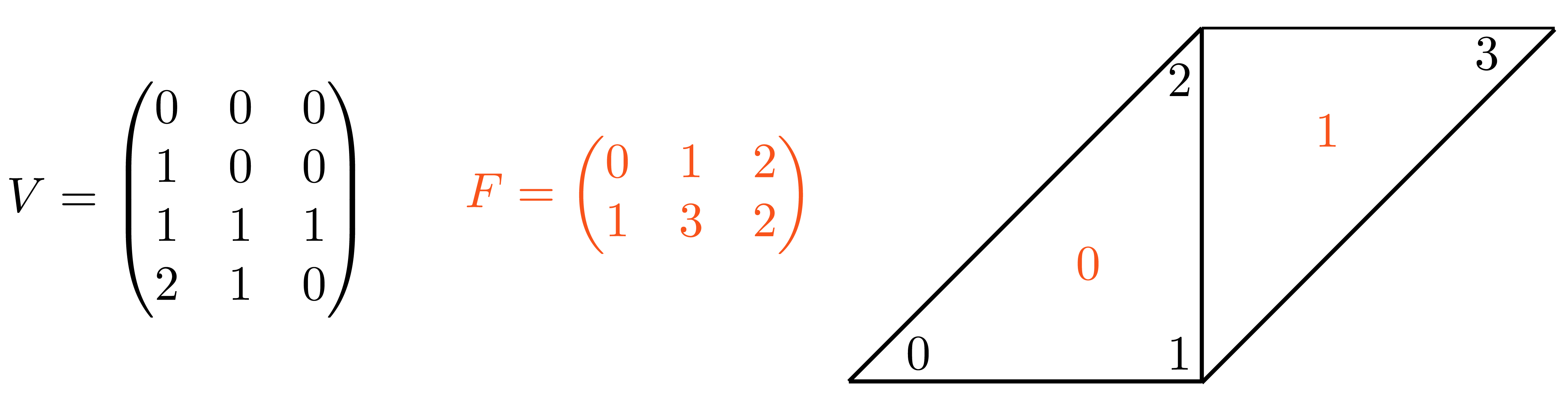
V = np.array([
[0., 0, 0],
[1, 0, 0],
[1, 1, 1],
[2, 1, 0]
])
F = np.array([
[0, 1, 2],
[1, 3, 2]
])
plot(V, F,shading={"width": 300, "height": 300})
Image(os.path.join(root_folder, "data", "mesh-1.png")) # This is what it supposed to look like
1.1 Sample Meshes
We will work with two meshes, one with open boundary(camel) and the second with no boundary(cow). Download the Camel mesh from this repository.
v_camel, f_camel = igl.read_triangle_mesh(os.path.join(root_folder, "data", "camelhead.off"))
plot(v_camel,f_camel,shading={"width": 300, "height": 300})
Image(os.path.join(root_folder, "data", "mesh-2.png")) # This is what it supposed to look like
Download the Spot(cow) from this repository
v_cow, f_cow = igl.read_triangle_mesh(os.path.join(root_folder, "data", "spot_triangulated.obj"))
plot(v_cow,f_cow,shading={"width": 300, "height": 300})
Image(os.path.join(root_folder, "data", "mesh-3.png")) # This is what it supposed to look like
2. Fixed Boundary Parameterization
We will work with the camel mesh for the fixed boundary case, and we will map its boundary to a circle
## Find the open boundary
bnd = igl.boundary_loop(f_camel)
## Map the boundary to a circle, preserving edge proportions
bnd_uv = igl.map_vertices_to_circle(v_camel, bnd)
plt.rcParams["figure.figsize"] = (3,3)
plt.plot(bnd_uv[:,0],bnd_uv[:,1])
plt.show()
For each of the fixed boundary parameterization we have to solve the following linear system:
$$A U=\bar{U},$$
where,
$$A=\begin{cases}1 & \text{if }i=j, \\
-\lambda_{i j} & \text{if } j \in N_{i},\\
0 & \text{else }.
\end{cases}, \qquad \lambda_{i j}=D_{i j} / \sum_{k \in N_{i}} D_{i k},$$
and,
$$u_{i}-\underbrace{\sum_{j \in N_{i}, j \leq n} \lambda_{i j} u_{j}}_{\text{unknown parameter points }}=\underbrace{\sum_{j \in N_{i}, j>n} \lambda_{i j} u_{j}}_{\text{fixed}}=\bar{u}_{i}.$$
Solve separately for $u$ and $v$.
2.1 Tutte - Uniform Weights Parameterization
We will implement the uniform weights parameterization from scratch, in this case the weights are,
$$D_{ij}=1 \qquad \lambda_{ij}=\frac{1}{N_i},$$
where $N_i$ is the number of neighbors. So that is the fist step in our algorithm:
neighbors = [[] for i in enumerate(v_camel)]
for i,face in enumerate(f_camel):
neighbors[face[0]].append(i)
neighbors[face[1]].append(i)
neighbors[face[2]].append(i)
Now we will build the linear system $A$ with the row, column, value data structure:
rows = []
columns = []
data = []
for i,j in enumerate(v_camel):
real_neighbors = list(set(f_camel[neighbors[i]].flatten())-{i})
for neighbor in real_neighbors:
rows.append(i)
columns.append(neighbor)
data.append(-1./len(real_neighbors))
rows.append(i)
columns.append(i)
data.append(1)
A = sp.sparse.coo_matrix((data, (rows, columns)))
We start to assemble the right side with the values of the boundary:
b_pre = np.array([bnd_uv[np.where(bnd==i)[0][0]] if np.isin(i,bnd) else np.array([0,0]) for i,j in enumerate(v_camel)])
Now we multiply the boundary value $u_{j}$ by the weights $\lambda_{ij}$, as a matrix multiplication
b_0 = A.dot(b_pre[:,0])*-1
b_1 = A.dot(b_pre[:,1])*-1
We delete the columns of boundary values of both $A$ and $b=\bar{U}$ since they are fixed and we sont found a solution for them:
b_0_final = np.delete(b_0,bnd,0)
b_1_final = np.delete(b_1,bnd,0)
A_final = sp.sparse.csr_matrix(np.delete(A.toarray(),bnd, axis=0))
A_final = sp.sparse.csr_matrix(np.delete(A_final.toarray(),bnd, axis=1))
We solve the linear systems $Au=b$ and $Av=b$,
u_pre = sp.sparse.linalg.spsolve(A_final, b_0_final)
v_pre = sp.sparse.linalg.spsolve(A_final, b_1_final)
We append the boundary values of $u$ and $v$ with the deleted boundary.
counter1 = 0
u_final = []
v_final = []
for i,j in enumerate(v_camel):
if i in bnd:
u_final.append(bnd_uv[np.where(bnd==i)[0][0]][0])
v_final.append(bnd_uv[np.where(bnd==i)[0][0]][1])
else:
u_final.append(u_pre[counter1])
v_final.append(v_pre[counter1])
counter1 = counter1 + 1
uv = np.column_stack([u_final, v_final])
v_p = np.hstack([uv, np.zeros((uv.shape[0],1))])
Now we plot the $uv$ space, triangulation alone, with a checkers parametrization, and the mesh with the texture coming from the parameterization:
p = subplot(v_camel, f_camel, uv=uv, shading={"wireframe": False, "flat": False}, s=[1, 2, 0])
subplot(uv, f_camel, uv=uv, shading={"wireframe": True, "flat": False}, s=[1, 2, 1],data=p)
subplot(uv, f_camel, uv=uv, shading={"wireframe": True, "flat": False}, s=[1, 2, 1],texture_data=utils.gen_checkers(1,1,1,1))
Image(os.path.join(root_folder, "data", "mesh-4.png")) # This is what it supposed to look like
2.2 Mean Value Parametrization
We will implement the mean weights parameterization from scratch as well, in this case the weights are,
$$D_{ij}=\frac{\tan\frac{\alpha_{ij}}{2}+ \tan\frac{\beta_{ij}}{2}}{r_{ij}} \qquad \lambda_{i j}=D_{i j} / \sum_{k \in N_{i}} D_{i k},$$
where $N_i$ is the number of neighbors. For the geometric meaning of $\alpha_{ij},\beta_{ij},r_{ij}$, please see the slides.
Now, we create a function to assemble matrix $D=l$ with one in the diagonal:
def mean_value_diy(v,f):
n = np.shape(v)[0]
L = sp.sparse.identity(n).tolil()
for face in f:
for e in range(3):
i,j,k = (face[e],face[(e+1)%3],face[(e+2)%3])
p1,p2,p3 = (v[i],v[j],v[k])
alpha = np.arctan2(np.linalg.norm(np.cross(p2-p3,p1-p3)),np.dot(p2-p3,p1-p3))
beta = np.arctan2(np.linalg.norm(np.cross(p3-p2,p1-p2)),np.dot(p3-p2,p1-p2))
gamma = np.arctan2(np.linalg.norm(np.cross(p2-p1,p3-p1)),np.dot(p2-p1,p3-p1))
L[i,j] = L[i,j] - np.tan(gamma*0.5)/np.linalg.norm(p2-p1)
L[j,i] = L[j,i] - np.tan(beta*0.5)/np.linalg.norm(p2-p1)
return(L)
l = mean_value_diy(v_camel,f_camel)
Now we will build the linear system $A$ with the row, column, value data structure:
columns = l.tocoo().col
rows = l.tocoo().row
data = l.tocoo().data
row_sum = np.zeros([np.shape(v_camel)[0]])
for index, row in enumerate(rows):
if columns[index] == rows[index]:
row_sum[row] = row_sum[row]
else:
row_sum[row] = row_sum[row] + data[index]
new_data = np.zeros([np.shape(data)[0]])
for i,j in enumerate(data):
if columns[i] == rows[i]:
new_data[i] = 1.
else:
new_data[i] = -1*j/row_sum[rows[i]]
A = sp.sparse.coo_matrix((new_data, (rows, columns)))
Now we proceed the same way as we did before with the uniform weight, to generate the parameterization.
b_pre = np.array([bnd_uv[np.where(bnd==i)[0][0]] if np.isin(i,bnd) else np.array([0,0]) for i,j in enumerate(v_camel)])
b_0 = A.dot(b_pre[:,0])*-1
b_1 = A.dot(b_pre[:,1])*-1
b_0_final = np.delete(b_0,bnd,0)
b_1_final = np.delete(b_1,bnd,0)
A_final = sp.sparse.csr_matrix(np.delete(A.toarray(),bnd, axis=0))
A_final = sp.sparse.csr_matrix(np.delete(A_final.toarray(),bnd, axis=1))
u_pre = sp.sparse.linalg.spsolve(A_final, b_0_final)
v_pre = sp.sparse.linalg.spsolve(A_final, b_1_final)
counter1 = 0
u_final = []
v_final = []
for i,j in enumerate(v_camel):
if i in bnd:
u_final.append(bnd_uv[np.where(bnd==i)[0][0]][0])
v_final.append(bnd_uv[np.where(bnd==i)[0][0]][1])
else:
u_final.append(u_pre[counter1])
v_final.append(v_pre[counter1])
counter1 = counter1 + 1
uv = np.column_stack([u_final, v_final])
v_p = np.hstack([uv, np.zeros((uv.shape[0],1))])
Now we plot the $uv$ space, triangulation alone, with a checkers parametrization, and the mesh with the texture coming from the parameterization:
p = subplot(v_camel, f_camel, uv=uv, shading={"wireframe": False, "flat": False}, s=[1, 2, 0])
subplot(uv, f_camel, uv=uv, shading={"wireframe": True, "flat": False}, s=[1, 2, 1],data=p)
subplot(uv, f_camel, uv=uv, shading={"wireframe": True, "flat": False}, s=[1, 2, 1],texture_data=utils.gen_checkers(1,1,1,1))
Image(os.path.join(root_folder, "data", "mesh-5.png")) # This is what it supposed to look like
2.3 Harmonic Parameterization
For the harmonic case we wil use the libigl harmonic_weights() function, in this case the weights are,
$$D_{ij}=\cot(\gamma_{ij}) + \cot(\gamma_{ji}) \qquad \lambda_{i j}=D_{i j} / \sum_{k \in N_{i}} D_{i k},$$
where $N_i$ is the number of neighbors. For the geometric meaning of $\gamma_{ij}$, please see the slides.
*For a full implementation of this algorithm see the Appendix.
## Harmonic parametrization for the internal vertices
uv = igl.harmonic_weights(v_camel, f_camel, bnd, bnd_uv, 1)
v_p = np.hstack([uv, np.zeros((uv.shape[0],1))])
Now we plot the $uv$ space, triangulation alone, with a checkers parametrization, and the mesh with the texture coming from the parameterization:
p = subplot(v_camel, f_camel, uv=uv, shading={"wireframe": False, "flat": False}, s=[1, 2, 0])
subplot(uv, f_camel, uv=uv, shading={"wireframe": True, "flat": False}, s=[1, 2, 1],data=p)
subplot(uv, f_camel, uv=uv, shading={"wireframe": True, "flat": False}, s=[1, 2, 1],texture_data=utils.gen_checkers(1,1,1,1))
Image(os.path.join(root_folder, "data", "mesh-6.png")) # This is what it supposed to look like
3 Free Boundary Parameterization
Fundamentally the algorithms for free boundary parameterization follow the recepie:
- Choose an energy(conformal energy, angle distortion)
- Start with an initial bijective parameterization
- E.g. Tutte - Uniform Weights
- Use nonlinear optimization tools to minimize
- Gradient descent
- Quasi-Newton methods
- …
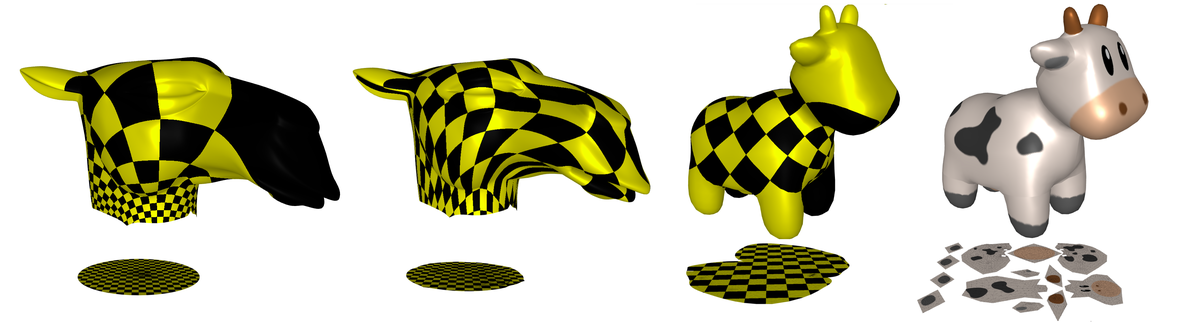
3.1 As Rigid As Possible(ARAP) - Parameterization
As-rigid-as-possible is a powerful single-patch, non-linear algorithm to compute a parametrization that strives to preserve distances (and thus angles). The idea is that each triangle is mapped to the plane trying to preserve its original shape, up to a rigid rotation.
We use the libigl harmonic_weights() function to initialize the Parameterization, then we initialize the igl.ARAP() solver, then we solve the specific initial condition with arap.solve():
## Harmonic parameterization for the internal vertices
uv = igl.harmonic_weights(v_camel, f_camel, bnd, bnd_uv, 1)
arap = igl.ARAP(v_camel, f_camel, 2, np.zeros(0))
uva = arap.solve(np.zeros((0, 0)), uv)
We solved the non-linear problem by minimizing an approximate quadratic energy with the solver from libigl.
Now we plot the $uv$ space, triangulation alone, with a checkers parametrization, and the mesh with the texture coming from the parameterization:
p = subplot(v_camel, f_camel, uv=uva, shading={"wireframe": False, "flat": False}, s=[1, 2, 0])
subplot(uva, f_camel, uv=uva, shading={"wireframe": True, "flat": False}, s=[1, 2, 1],data=p)
subplot(uva, f_camel, uv=uva, shading={"wireframe": True, "flat": False}, s=[1, 2, 1],texture_data=utils.gen_checkers(1,1,1,1))
Image(os.path.join(root_folder, "data", "mesh-7.png")) # This is what it supposed to look like
3.2 Least Squares Conformal Map(LSCM) - Parameterization
Least squares conformal maps parametrization minimizes the conformal (angular) distortion of the parametrization. Differently from harmonic parametrization, it does not need to have a fixed boundary. In this case we would use a different mesh than before, a mesh with no boundary.
v_cow_sur, f_cow_sur = igl.read_triangle_mesh(os.path.join(root_folder, "data", "spot_surgery.obj"))
Even though the mesh has no boundary, we are looking for a parameterization that is bijective, so we make a small surgery to the mesh, to obtain a global parameterization.
surgery = np.genfromtxt(os.path.join(root_folder, "data", "surgery.csv"), delimiter=',')
faces_pre = []
for i,value in enumerate(surgery):
faces_pre.append([i,i+1])
faces = np.array(faces_pre[0:-1], dtype=np.int)
p = plot(v_cow_sur,f_cow_sur)
p.add_edges(surgery, faces, shading={"line_color": "red"});
p.add_points(surgery, shading={"point_color": "green"})
Image(os.path.join(root_folder, "data", "mesh-10.png")) # This is what it supposed to look like
We generate a boundary in the surgery line, and duplicate the vertices along this line. Therefore the triangles left to the line have different vertices than the triangles right to the line.
Note that although we created a boundary, in this case we do not need to fix the boundary. To remove the null space of the energy and make the minimum unique, it is sufficient to fix two arbitrary vertices to two arbitrary positions.
# Fix two points on the boundary
b = np.array([2, 1])
bnd = igl.boundary_loop(f_cow_sur)
b[0] = bnd[0]
b[1] = bnd[int(bnd.size / 2)]
bc = np.array([[0.0, 0.0], [1.0, 0.0]])
# LSCM parametrization
_, uv = igl.lscm(v_cow_sur, f_cow_sur, b, bc)
We solved the non-linear problem by minimizing an approximate quadratic energy with the solver from libigl inside the function lscm().
Now we plot the $uv$ space, triangulation alone, with a checkers parametrization, and the mesh with the texture coming from the parameterization:
p = subplot(v_cow_sur, f_cow_sur, uv=uv, shading={"wireframe": False, "flat": False}, s=[1, 2, 0])
subplot(uv, f_cow_sur, uv=uv, shading={"wireframe": True, "flat": False}, s=[1, 2, 1],data=p)
subplot(uv, f_cow_sur, uv=uv, shading={"wireframe": True, "flat": False}, s=[1, 2, 1],texture_data=utils.gen_checkers(1,1,1,1))
Image(os.path.join(root_folder, "data", "mesh-8.png")) # This is what it supposed to look like
4. Atlas Parameterization
A different approach consists in separate the mesh in several parts. For this we initially cut the mesh in multiple patches that can be separately parametrized. The generated maps are discontinuous on the cuts (often referred as seams).
vmod_spot = np.genfromtxt(os.path.join(root_folder, "data", "vmod_spot.csv"), delimiter=',')
fvp_spot = np.genfromtxt(os.path.join(root_folder, "data", "fvp_spot.csv"), delimiter=',')
uv = np.genfromtxt(os.path.join(root_folder, "data", "uv_spot.csv"), delimiter=',')
p = plot(vmod_spot,fvp_spot)
for i in range(13):
boundary = np.genfromtxt(os.path.join(root_folder, "data", 'bnd_{}.csv'.format(i)), delimiter=',')
faces_pre = []
for i,value in enumerate(boundary):
faces_pre.append([i,i+1])
faces_pre = faces_pre[0:-1]
faces_pre.append([len(faces_pre),0])
faces = np.array(faces_pre, dtype=np.int)
p.add_edges(vmod_spot[boundary.astype(int)], faces, shading={"line_color": "red"});
Image(os.path.join(root_folder, "data", "mesh-11.png")) # This is what it supposed to look like
4.1 Artistic Parameterization
From these cuts, we can parametrize each of these sections and texture each of them using a design program.
plot(uv, fvp_spot, uv=uv, shading={"wireframe": True, "flat": False},texture_data=utils.gen_checkers(1,1,1,1))
Image(os.path.join(root_folder, "data", "mesh-12.png")) # This is what it supposed to look like
We can paint these textures with the style of a cow. We use the texture from Keenan Crane repository, slightly modified from 1024x1024 to 1080x1080 to mathc the style of the meshplot texturing algorithm.
im = PIL.Image.open(os.path.join(root_folder, "data", "spot_texture_mod.png"))
im_flip = ImageOps.flip(im)
pix = np.array(im_flip)/255.
im.resize((300, 300))
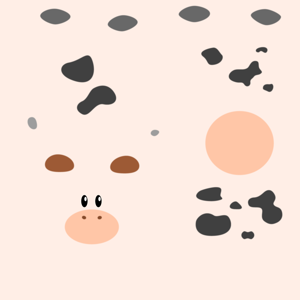
We use the $uv$ mapping from Keenan Crane design as well to map the texture to the surface cuts:
p = subplot(vmod_spot, fvp_spot, uv=uv, shading={"wireframe": False, "flat": False}, s=[1, 2, 0],texture_data=pix[:,:,0:3])
subplot(uv, fvp_spot, uv=uv, shading={"wireframe": False, "flat": False}, s=[1, 2, 1],texture_data=pix[:,:,0:3],data=p)
subplot(uv, fvp_spot, uv=uv, shading={"wireframe": True, "flat": False}, s=[1, 2, 0],texture_data=utils.gen_checkers(1,1,1,1))
Image(os.path.join(root_folder, "data", "mesh-9.png")) # This is what it supposed to look like
4.2 Extra Topics
Other interesting topics related to parameterization are:
- Global seamless parametrization: These are global parametrization algorithm that hides the seams, making the parametrization “continuous”, under specific assumptions. For this parameterization it is interesing to analyze vector fields on the surface of meshes. An example of this method is the Poisson Parametrization. See Global, Seamless Integer-grid Parametrization.
- Editing of the Resulting Flattened Shape: Novel algorithms not only allow for a desired parameterization, but users can direct control over the shape of the flattened domain—rather than being stuck with whatever the software provides. See Boundary First Flattening.
5. Appendix: Harmonic Parameterization Implementation
We will implement the mean weights parameterization from scratch as well, in this case the weights are,
$$D_{ij}=\cot(\gamma_{ij}) + \cot(\gamma_{ji}) \qquad \lambda_{i j}=D_{i j} / \sum_{k \in N_{i}} D_{i k},$$
where $N_i$ is the number of neighbors. For the geometric meaning of $\gamma_{ij}$, please see the slides.
Now, we create a function to assemble matrix $D=l$ with one in the diagonal:
def cotmatrix_diy(v,f):
n = np.shape(v)[0]
L = sp.sparse.identity(n).tolil()
for face in f:
for e in range(3):
i,j,k = (face[e],face[(e+1)%3],face[(e+2)%3])
p1,p2,p3 = (v[i],v[j],v[k])
alpha = np.arctan2(np.linalg.norm(np.cross(p2-p3,p1-p3)),np.dot(p2-p3,p1-p3))
beta = np.arctan2(np.linalg.norm(np.cross(p3-p2,p1-p2)),np.dot(p3-p2,p1-p2))
gamma = np.arctan2(np.linalg.norm(np.cross(p2-p1,p3-p1)),np.dot(p2-p1,p3-p1))
L[i,i] = L[i,i] + 0.5/np.tan(beta)
L[j,j] = L[j,j] + 0.5/np.tan(gamma)
L[i,j] = L[i,j] - 0.5/np.tan(alpha)
L[j,i] = L[j,i] - 0.5/np.tan(alpha)
L = L - sp.sparse.identity(n).tolil()
return(L)
There is a function in the library that assembles the negative of this matrix in the libigl library, igl.cotmatrix(), next we compare them using the frobenius norm:
L = igl.cotmatrix(v_camel, f_camel)
l = cotmatrix_diy(v_camel,f_camel)
sp.sparse.linalg.norm(L-(l*-1))
3.94601343956224e-11
Now we will build the linear system $A$ with the row, column, value data structure:
columns = l.tocoo().col
rows = l.tocoo().row
data = l.tocoo().data
row_sum = np.zeros([np.shape(v_camel)[0]])
for index, row in enumerate(rows):
if columns[index] == rows[index]:
row_sum[row] = row_sum[row]
else:
row_sum[row] = row_sum[row] + data[index]
new_data = np.zeros([np.shape(data)[0]])
for i,j in enumerate(data):
if columns[i] == rows[i]:
new_data[i] = 1.
else:
new_data[i] = -1*j/row_sum[rows[i]]
A = sp.sparse.coo_matrix((new_data, (rows, columns)))
Now we proceed the same way as we did before with the uniform weight and the mean value to generate the parameterization.
bnd = igl.boundary_loop(f_camel)
bnd_uv = igl.map_vertices_to_circle(v_camel, bnd)
b_pre = np.array([bnd_uv[np.where(bnd==i)[0][0]] if np.isin(i,bnd) else np.array([0,0]) for i,j in enumerate(v_camel)])
b_0 = A.dot(b_pre[:,0])*-1
b_1 = A.dot(b_pre[:,1])*-1
b_0_final = np.delete(b_0,bnd,0)
b_1_final = np.delete(b_1,bnd,0)
A_final = sp.sparse.csr_matrix(np.delete(A.toarray(),bnd, axis=0))
A_final = sp.sparse.csr_matrix(np.delete(A_final.toarray(),bnd, axis=1))
u_pre = sp.sparse.linalg.spsolve(A_final, b_0_final)
v_pre = sp.sparse.linalg.spsolve(A_final, b_1_final)
counter1 = 0
u_final = []
v_final = []
for i,j in enumerate(v_camel):
if i in bnd:
u_final.append(bnd_uv[np.where(bnd==i)[0][0]][0])
v_final.append(bnd_uv[np.where(bnd==i)[0][0]][1])
else:
u_final.append(u_pre[counter1])
v_final.append(v_pre[counter1])
counter1 = counter1 + 1
uv = np.column_stack([u_final, v_final])
v_p = np.hstack([uv, np.zeros((uv.shape[0],1))])
Now we compare the resulting $uv$ parameterization with the function igl.harmonic_weights() of the library:
uv_igl = igl.harmonic_weights(v_camel, f_camel, bnd, bnd_uv, 1)
np.linalg.norm(uv - uv_igl)
3.0242204120512586e-12
Now we plot the $uv$ space, triangulation alone, with a checkers parametrization, and the mesh with the texture coming from the parameterization:
p = subplot(v_camel, f_camel, uv=uv, shading={"wireframe": False, "flat": False}, s=[1, 2, 0])
subplot(uv, f_camel, uv=uv, shading={"wireframe": True, "flat": False}, s=[1, 2, 1],data=p)
subplot(uv, f_camel, uv=uv, shading={"wireframe": True, "flat": False}, s=[1, 2, 1],texture_data=utils.gen_checkers(1,1,1,1))
Image(os.path.join(root_folder, "data", "mesh-6.png")) # This is what it supposed to look like
6. References
- Alec Jacobson, Daniele Panozzo, & others. (2018). libigl: A simple C++ geometry processing library. https://libigl.github.io/
- Sebastian Kock.(2019). MeshPlot. https://skoch9.github.io/meshplot/tutorial/
- Mikhail Bessmeltsev. (2019). Geometric Modeling and Shape Analysis. http://www-labs.iro.umontreal.ca/~bmpix/teaching/6113/2019/
- Solomon, Justin. Numerical algorithms: methods for computer vision, machine learning, and graphics. CRC press, 2015.
- Solomon, Justin. 6.838: Shape Analysis (Spring 2019). https://groups.csail.mit.edu/gdpgroup/6838_spring_2019.html
- Gabriel Peyré. (2012). Mesh Processing Course. https://www.slideshare.net/gpeyre/mesh-processing-course-introduction
- Keenan Crane. (2021). CS 15-458/858: Discrete Differential Geometry. https://brickisland.net/DDGSpring2021/
Keith Y. Patarroyo
Research Fellow on Chemical Intelligence, Open-Endedness and Hierarchical Assembly
My research interests include Hierarchical Assembly, Artificial Intelligence, and Open-Endedness.